
휴머노이드 로봇이 인간과 자연스럽게 소통하려면 “움직이는 얼굴”만으로는 충분하지 않습니다.
사람은 표정에서 의도·감정·맥락을 읽으며, 그 과정에는 미세 근육 떨림, 시선 흐름, 입꼬리 비대칭 등 복합 요소가 포함됩니다.
저희 연구팀은 이러한 인간의 표정 해석 방식을 모방하기 위해 표정 알고리즘을 단순 감정 코드를 실행하는 단계를 넘어, 데이터 기반의 예측 시스템으로 진화시켜 왔습니다.
본 글은 지난 5년간의 연구 경험을 바탕으로 표정 생성 알고리즘을 구현 난이도와 리얼리즘 관점에서 6단계로 정리하고, 프로젝트 목표(MVP, 리얼리즘, 안전)에 따라 어떤 접근이 적합한지 상세한 의사결정 기준을 제공합니다.
특히 데이터 편향, 전환 품질 튜닝, 안전 기준 등 실무적 관점을 강조했습니다.
이 글에서 얻는 것
- 표정 생성 알고리즘 6단계 진화 구조와 단계별 구현 난이도
- 각 단계의 장점/한계, 필요한 연산 자원, 및 실제 적용 상황 (의사결정 표 포함)
- 전환(Transition) 품질을 올리는 3요소(속도·방향·진폭)의 수학적 튜닝 기법
- 실제 프로젝트에서 발생한 실패 사례 2개 + 구체적인 개선 노하우 2개
- 개발자 관점에서 필수적인 체크리스트 12개(데이터 편향, 안전, 개인정보 포함)
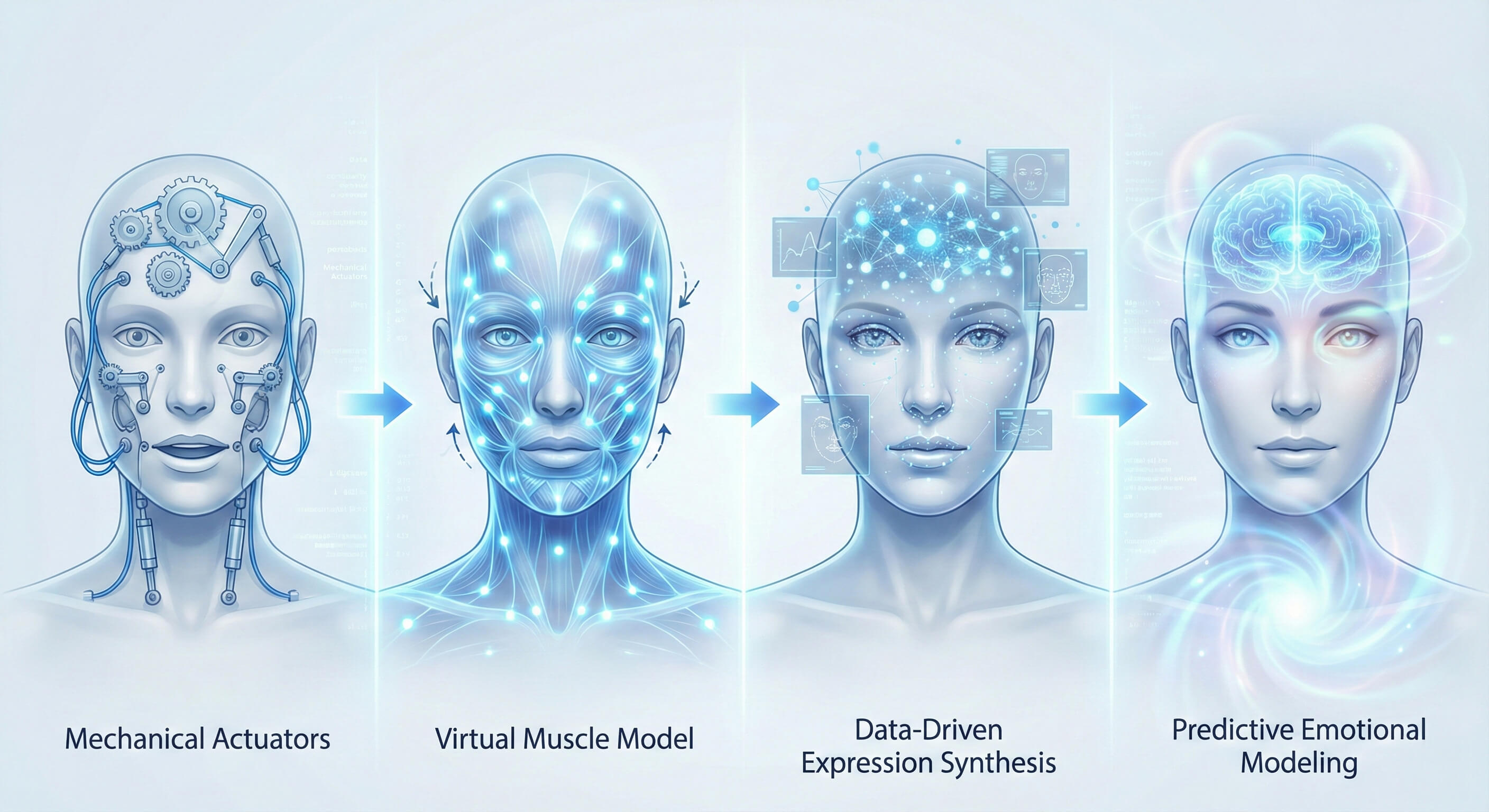
1) 진화의 핵심: “표정 모양”에서 “표정의 맥락적 흐름”으로
- 초기 단계 (규칙/근육): 감정 코드를 받으면 정해진 모터 각도를 실행하는, 정적인 포즈 중심의 방식이었습니다.
- 중기 단계 (맥락/데이터): 근육 단위 분해(가상 근육)를 통해 조합 가능한 표정을 늘리고, 인간의 실제 패턴을 학습하여 유기적인 흐름을 만드는 방향으로 발전했습니다.
- 후기 단계 (행동/예측): 맥락과 데이터를 넘어, 시선, 고개, 몸동작과 통합하고 사용자의 감정을 선제적으로 예측하여 상호작용의 질을 극대화합니다.
2) 표정 생성 알고리즘 6단계 로드맵
단계 1. 규칙 기반(사전 정의 표정 매핑)
가장 구현 난이도가 낮고 연산 자원이 적게 드는 초기 방식입니다. “감정 코드 → 모터 명령”을 1:1로 매핑합니다.
예: 웃음 = 입꼬리 20도 상승, 놀람 = 눈꺼풀 30도 개방 같은 규칙을 매뉴얼로 정의합니다.
- 장점: 구현이 단순하고 디버깅이 쉽습니다. (특정 모터 문제만 추적하면 됨)
- 한계: 표정의 강도(농도) 조절, 맥락 반영, 그리고 가장 중요한 자연스러운 전환(Transition)이 어렵습니다. (표정이 뚝뚝 끊기는 문제)
단계 2. 근육 모델 기반(가상 근육/부위 분해)
사람 얼굴의 FACS(Facial Action Coding System)를 참고하여 주요 근육을 “기계적 대응 요소”로 분해해 조합합니다.
예: 눈 주름 근육 → 3개의 미세 서보 모터, 입꼬리 올림 근육 → 와이어 기반 구동 등 기계적 구조와 근육을 매핑합니다.
- 장점: 표정 종류가 기하급수적으로 늘어나며, 부위별 독립 제어(예: 왼쪽 눈만 윙크)가 가능해집니다.
- 한계: 기계적 구조의 한계를 벗어날 수 없으며, 감정의 “흐름(동적 변화)”을 만들기 위해서는 상위 제어 알고리즘이 복잡해집니다.
단계 3. 감정-상황 매핑(맥락 기반 표정 선택)
상호작용에서는 “정답 표정”이 아니라 “상황에 맞는 표정”이 신뢰를 결정합니다.
이 단계는 목소리 톤, 문장 의미, 주변 소음/분위기, 사용자 거리 등을 피처(Feature)로 정의하여 표정을 조정합니다.
- 핵심 난제: 맥락 입력을 어떤 피처로 정의하고, 각 피처가 표정 선택에 얼마나 가중치를 가질지 결정하는 튜닝 작업이 매우 어렵습니다.
- 효과: 사용자가 슬픈 이야기를 할 때 로봇이 '공감 표정'을 지음으로써 정서적 일관성이 확보됩니다.
단계 4. 데이터 기반 학습(사람 표정 패턴 학습)
실제 인간의 표정 데이터(영상)를 수집하고 딥러닝 모델로 학습하는 접근입니다.
규칙 기반으로는 불가능한 미세한 패턴(비대칭 패턴, 주름 타이밍, 입·볼 동시 움직임 비율, 순간 근육 떨림) 등을 패턴 단위로 모델링합니다.
- 장점: 복합 감정(의구심·집중·불안 등) 표현이 가능해지며, 가장 자연스러운 표정 전환이 가능합니다.
- 주의: 데이터 품질과 편향이 곧 결과 품질입니다. 특정 인종, 성별, 연령에 편향된 데이터를 학습할 경우, 그 외 사용자에게는 오히려 부자연스럽게 느껴지는 심각한 문제를 야기합니다.
단계 5. 감정-행동 통합(시선·고개·몸동작 결합)
표정을 단독으로 출력하지 않고 시선·고개·몸동작까지 묶어 “총체적인 신체 언어”를 구성합니다.
예: 미소 + 고개 미세 기울임, 놀람 + 몸의 미세 후퇴, 호기심 + 목표 추적 시선 같은 결합이 대표적입니다.
- 장점: 사용자는 표정뿐 아니라 신체 언어를 함께 읽기 때문에 자연스러움과 몰입도가 획기적으로 상승합니다.
- 난이도: 제어 복잡도가 급증하며, 표정 모터와 신체 모터 간의 동작 타이밍 동기화(Synchronization) 문제가 발생하기 쉽습니다.
단계 6. 상호감정 예측(예측 기반 표정 생성)
현재까지 가장 진보한 단계이며, 고도의 연산 자원과 정교한 모델이 필요합니다.
사용자가 곧 느낄 감정을 예측해 표정을 선제적으로 생성합니다. (예: 사용자가 말하기 전에 공감 표정을 미리 짓기)
입력 피처로는 사용자 눈동자 움직임, 발화 속도, 피부색 변조, 호흡 리듬 등이 사용됩니다.
- 장점: “반응”을 넘어 “흐름을 읽는 상호작용”으로 확장되어 사용자 경험을 극대화합니다.
- 주의: 과잉 예측이나 오류 예측은 사용자에게 불쾌감 또는 위협적인 인상을 줄 수 있으므로, 보수적인 한계값과 안전장치를 통한 튜닝이 필수적입니다.
3) 의사결정 표: 어떤 단계가 지금 프로젝트에 맞는가
아래 표는 실제 프로젝트 목표와 연산 환경을 고려한 설계 판단을 돕기 위한 권장 예시입니다.
프로젝트 목표(리얼리즘/비용/안전/연산 자원)에 따라 조정해야 합니다.
| 목표/환경 | 권장 단계 | 이유 | 리스크 (실무적 관점) |
|---|---|---|---|
| MVP, 빠른 구현 | 단계 1~2 | 구현·디버깅이 단순하고 저전력 모터로도 구현 가능 | 표정이 딱딱해 보일 수 있으며, 리얼리즘 확장이 어렵다. |
| 대화형 서비스(맥락 중요) | 단계 3 | 상황-표정 일치로 신뢰 상승, 연산 자원 효율적 | 맥락 피처 설계 난이도, 노이즈 환경에서 오류 가능성 |
| 리얼리즘 강화(자연스러운 흐름) | 단계 4 | 사람 패턴 학습으로 유기적 전환, 고품질 모터 제어 필수 | 데이터 품질/편향 관리 필요, 학습 및 연산 비용 높음 |
| 몰입형 상호작용(몸까지 연동) | 단계 5 | 신체 언어까지 결합하여 자연스러움 상승 | 제어 복잡도 증가, 각 모듈 간 타이밍 동기화 난제 |
| 고급 상호작용(선제 공감) | 단계 6 | 예측 기반으로 상호작용의 흐름 강화 | 과잉 예측 시 거부감, 모델의 오작동 시 안전 문제 |
4) 전환(Transition) 품질을 결정하는 3요소: 튜닝 노하우
표정의 자연스러움은 “표정 모양(포즈)”보다 “표정 간의 전환 방식(다이나믹스)”에서 크게 갈립니다.
- 전환 속도 (Velocity): 표정 A에서 표정 B로 변하는 시간(Time)입니다. 너무 짧으면 기계적으로 인식되고, 너무 길면 지루해집니다. (튜닝 노하우: 가속/감속 시 램프(Ramp) 함수를 적용하여 부드러운 시작/정지 구현)
- 전환 방향 (Trajectory): 목표 표정으로 가는 모터 각도의 궤적입니다. 단조로운 선형 궤적 대신, 포물선이나 스플라인 곡선을 적용하면 훨씬 유기적인 움직임이 가능합니다.
- 미세 진폭 (Amplitude/Noise): 표정 B에 도달한 후의 미세한 움직임입니다. ‘완전 정지’보다 랜덤 노이즈 기반의 미세 흔들림 (예: ±0.1° 수준)이 생체 움직임을 모방하여 자연스러움을 보강할 수 있습니다.
5) 실패 사례 2개 및 개선 사례 2개: 실무적 교훈
실패 사례 1) 규칙 기반에서 전환이 “뚝” 끊기는 문제
- 증상: 로봇이 웃음 → 무표정 → 놀람 순으로 표정을 바꿀 때, 정지 이미지처럼 움직임이 갑자기 멈추거나 시작됨.
- 원인: 특정 각도만 실행하고 표정 간의 보간(Interpolation) 함수가 적용되지 않았거나, 단순히 선형 보간만 사용함.
개선 사례 1) 전환 파라미터를 최소 3개로 분리 및 비선형 보간 적용
- 권장 예시: 속도·방향·진폭을 분리하여 전환을 설계하고, 코사인 보간(Cosinus Interpolation)이나 스플라인 보간을 사용하여 모터 명령을 부드럽게 연결.
- 효과: 동일 표정이라도 “유기적인 변화”로 인식될 가능성이 상승하여 불쾌한 골짜기 현상(Uncanny Valley) 회피에 유리함.
실패 사례 2) 맥락 불일치(공감해야 할 때 미소)
- 증상: 사용자 목소리 톤/거리/분위기와 표정이 어긋남.
- 원인: 맥락 입력(목소리 톤/문장 의미/사용자 거리)을 표정 선택에 반영하지 않았거나, 긍정적 감정 피처에만 과도한 가중치가 부여됨.
개선 사례 2) 맥락 피처를 4개로 고정하고 '부정적 피드백 루프' 튜닝
- 권장 예시: 목소리 톤(Pitch/Energy) / 문장 의미(Sentiment) / 주변 분위기 / 사용자 거리 4개로 시작하고, 부정적 피처(낮은 톤, 부정 의미)가 감지되면 자동으로 긍정 표정 출력을 억제하는 안전 루프를 설계.
- 효과: “상황에 맞는 표정” 일관성이 개선되어 로봇에 대한 신뢰가 급상승함.
6) 체크리스트: 실무자를 위한 12가지 품질 지표
- 현재 목표가 MVP(빠른 구현)인지, 리얼리즘 강화인지, 안전성 우선인지 명확히 정의했습니까
- 규칙 기반을 쓰는 경우, 감정 강도(0~1 등)를 최소 3단계로 분리하고 비선형 전환 함수를 적용했습니까
- 근육 모델을 쓰는 경우, 부위별 독립 제어(눈/입/광대)의 기계적 허용 범위(Tolerance)를 정의했습니까
- 맥락 기반이라면 입력 피처(톤/의미/분위기/거리)를 확정하고 가중치 매핑 테이블을 구축했습니까
- 전환 품질(속도/방향/진폭) 파라미터가 존재하며, 램프 함수와 곡선 보간이 적용되었습니까
- 데이터 기반이라면 비대칭·주름 타이밍·동시 움직임 비율 등 다이나믹 패턴을 학습 항목에 포함했습니까
- 행동 통합 시, 표정·시선·고개·몸동작의 출력 동기화 지연(Latency)을 100ms 이내로 관리합니까
- 예측 모델을 쓰는 경우, 과잉 예측을 막는 보수적 한계값(예: 60% 이하 예측 신뢰도 시 무표정 유지)이 있습니까
- 사용자 반응에 따라 표정을 실시간 조정하는 피드백 루프(Feedback Loop)가 최소 30Hz 이상으로 작동합니까
- 데이터 편향(특정 표정/인종/성별 편중)을 정량적으로 점검하고 보정하는 절차가 있습니까
- 개인정보/프라이버시(영상·표정 데이터) 수집, 저장, 폐기 원칙을 문서화하고 고지했습니까
- 안전(접촉·압력·온도) 관점에서 표정 출력의 최대 속도와 힘에 제한이 존재합니까
7) 관련 글
- 휴머노이드 얼굴 구조의 기본 원리 및 설계 노하우
- 휴머노이드 얼굴 표현 원리 (Humanoid Facial Expression Principles) 심층 분석
- 휴머노이드 얼굴 표정과 음성 연동 AI 설계의 난제와 해법
- 휴머노이드 얼굴 표정 학습 데이터셋 구축 및 편향 관리 가이드
- 휴머노이드 얼굴의 표정 불일치(언캐니) 해결 전략 및 제어 시스템
8) 결론
- 표정 알고리즘은 "각도 실행"에서 "맥락적 흐름 학습"으로 발전해 왔으며, 핵심은 리얼리즘과 신뢰입니다.
- 자연스러움은 전환 품질(속도·방향·진폭)의 비선형 튜닝과 맥락 일치에서 크게 갈리며, 이는 단순한 코딩이 아닌 심층적인 제어 시스템 설계 영역입니다.
- 프로젝트 목표에 따라 단계(1~6)를 현실적으로 선택하고, 실무적 품질 지표(체크리스트)로 구현 난이도와 안전을 관리하는 접근이 가장 효율적입니다.
Q&A
Q1) 초창기 표정이 왜 부자연스럽습니까? 가장 근본적인 원인은 무엇입니까
가장 근본적인 원인은 시간에 따른 움직임의 다이나믹스가 부재했기 때문입니다.
단일 명령 기반으로 특정 각도만 실행하고, 표정 간의 자연스러운 가속/감속 보간(Ramp function)이 없었으므로 정지 이미지처럼 "뚝뚝 끊어지는" 기계적 인상을 주었습니다.
Q2) 근육 모델 기반의 가장 큰 변화와 한계는 무엇입니까
가장 큰 변화는 표정의 조합 가능성이 기하급수적으로 늘어난 것입니다.
하지만 한계는 기계적 구조의 한계를 벗어날 수 없다는 점입니다. 아무리 정교한 근육 모델을 만들어도, 모터와 실리콘 표피의 물리적 제약 때문에 인간 근육의 미세한 움직임을 100% 모사하는 것은 불가능합니다.
Q3) 데이터 기반 학습은 무엇을 학습하며, 어떤 실무적 위험이 있습니까
데이터 기반 학습은 규칙으로 정의하기 어려운 인간 표정의 '흐름'의 특징(비대칭 패턴, 주름 타이밍, 동시 움직임 비율, 근육 떨림)을 학습합니다.
실무적 위험은 데이터 편향(Data Bias)입니다. 학습 데이터가 특정 집단에 편중될 경우, 로봇은 그 외 집단의 표정을 부정확하게 인식하거나 부자연스럽게 출력하는 심각한 오류를 발생시킵니다.
Q4) 감정-행동 통합 시 가장 큰 기술적 난제는 무엇입니까
가장 큰 난제는 표정 모터와 신체 모터 간의 동작 타이밍 동기화(Synchronization)입니다.
로봇의 시선 처리, 고개 움직임, 표정 변화가 동시에, 지연 없이 일어나야 하는데, 각 모듈의 통신 속도와 응답 시간이 달라 출력 지연(Latency)이 발생하기 쉽습니다. 이를 100ms 이내로 줄이는 것이 핵심입니다.
Q5) 예측 기반 알고리즘을 튜닝할 때 보수적 한계값을 두는 이유는 무엇입니까
예측 모델은 오류 가능성을 항상 내포합니다.
사용자가 곧 느낄 감정을 섣불리 예측하여 표정을 선제적으로 생성했는데 예측이 틀릴 경우, 사용자는 불쾌감이나 위협적인 느낌을 받을 수 있습니다. 따라서 예측 신뢰도가 60% 이하일 경우 표정을 출력하지 않고 무표정을 유지하는 등, 사용자 안전과 심리적 안정을 위한 보수적 한계값을 두어야 합니다.
※ 본 글은 지난 5년간의 휴머노이드 표정 시스템 개발 경험을 바탕으로 기술 이해를 돕기 위한 정보이며, 실제 제품/서비스 적용 시에는 안전·윤리·개인정보 기준을 반드시 별도로 검토해야 합니다.
'휴머노이드 얼굴 > 7. 감정·표정 합성 알고리즘' 카테고리의 다른 글
| 휴머노이드 얼굴 LED 기반 ‘감정 보조 표시’ 시스템 기술 분석: 표정이 부족할 때 ‘보조 신호’로만 써야 합니다 (0) | 2025.12.15 |
|---|---|
| 휴머노이드 얼굴의 마이크로 표현(미세 표정) 구현 기술: 0.5mm 이하 움직임이 신뢰도를 바꿉니다 (0) | 2025.12.14 |
| 휴머노이드 얼굴 눈썹 움직임 시스템: 1축·2축·Bowden Cable 비교와 텐션 100~300g 설계 기준 (0) | 2025.12.11 |
| 휴머노이드 얼굴에서의 자연스러운 미소 만들기: 입꼬리 5~12mm, 눈가 연동, 비대칭 ±1mm로 “기계 웃음”을 줄입니다 (0) | 2025.12.11 |
| 휴머노이드 얼굴 감정 표현 6대 기본세트 구현하기: AU 조합과 속도·강도 기준 템플릿 (0) | 2025.12.11 |
| 휴머노이드 얼굴의 눈 감정 표현 디자인: 동공 1~2mm 변화와 시선·눈꺼풀·눈썹 연동 기준 (0) | 2025.12.11 |