
휴머노이드 얼굴에서 비율은 단순한 미적 요소가 아니라 “심리적 안정감”을 좌우하는 구조 변수이자 첫인상의 핵심입니다.
로봇을 개발하면서 수많은 사람을 대상으로 테스트했을 때, 사람은 얼굴을 보는 순간 0.1초 안팎의 짧은 시간에 “익숙함/낯섦”을 판단한다는 것을 체감했습니다. 이 짧은 순간에 비율이 어긋나면, 인공지능이 아무리 정교하게 감정을 표현해도 언캐니 밸리(Uncanny Valley)의 부자연스러움이 먼저 올라와 로봇과의 교감이 차단됩니다.
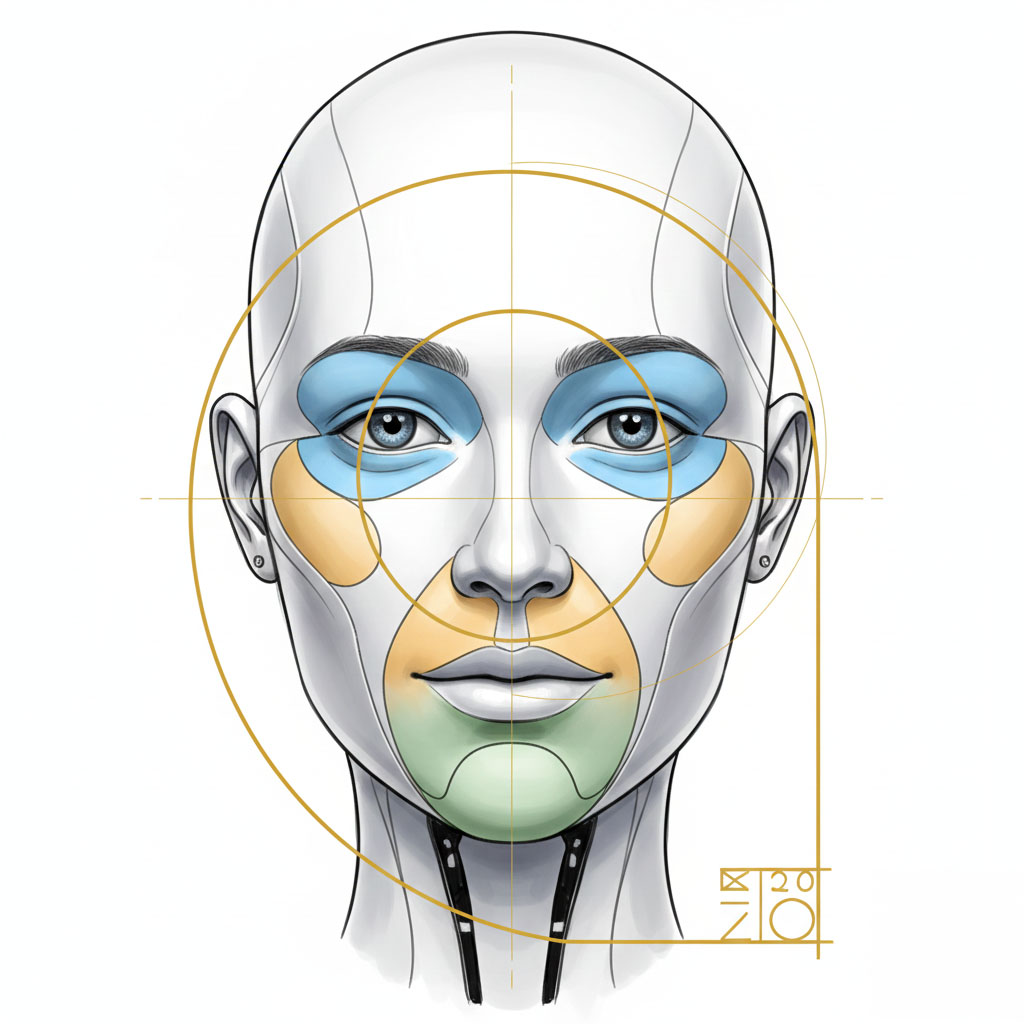
본 글은 휴머노이드 개발 실무 경험을 바탕으로, 골든 레이시오(1:1.618)를 포함해, 실전에서 자주 쓰이는 얼굴 비례 기준과 설계 체크포인트를 수치 중심으로 정리하고, 제가 직접 부딪혀 해결했던 문제점까지 공유합니다.
핵심 요약
- 비율 설계는 “정답 값”을 맞추는 것이 아니라 수많은 테스트를 거쳐 안정감을 주는 '허용 범위'를 만드는 지난한 작업입니다.
- 골든 레이시오(1:1.618)는 초기 콘셉트의 참고 프레임으로는 유용하지만, 그대로 적용하면 오히려 구동 시 어색해지거나 기계적 간섭 문제가 발생할 수 있습니다.
- 제가 현장에서 느끼는 우선순위는 다음 3가지입니다.
- 얼굴 3분할(헤어라인-코-턱): 전체적인 연령대와 인상을 결정합니다.
- 눈 위치 및 간격: 로봇의 인격화를 좌우하며, 언캐니가 가장 빠르게 발생하는 곳입니다.
- 턱/광대 볼륨과 공간 확보: 실제 표정 구동 시 피부 왜곡(찌그러짐)이 적어야 합니다.
- 비율이 잘 잡히면 표정 품질이 올라갈 뿐만 아니라, 이후 발생하는 와이어링, 서보 모터, 피부 유지보수(간섭/마찰) 문제도 줄어듭니다.
1) 왜 로봇 얼굴은 인간 평균과 ‘완전히 동일’할 필요가 없습니까: 인지 안정성
- 사람은 미세한 수치 차이를 평균값을 정확히 계산해서 인식하는 것이 아닙니다. 대신 “이 패턴이 익숙한가”를 먼저 보고, 낯설면 곧바로 인지적 거부감이 생깁니다. 제가 휴머노이드를 설계하며 깨달은 점은, 인간의 평균값을 100% 복제하려고 노력하기보다 다음 세 가지를 만족하는 편이 훨씬 효율적이고 중요했습니다.
- 첫인상에서 낯섦을 줄이는 최소한의 구조적 비율
- 표정 구동 시 기계적 움직임과 피부 소재의 제약에도 불구하고 왜곡(찌그러짐/간섭)이 적은 구조
- 제작 공정의 난이도와 유지보수에 맞는 합리적인 단순화
- 즉, 휴머노이드 얼굴의 비율은 “인간 복제”가 아니라, '로봇-인간 상호작용'을 위한 “인지 안정성”을 목표로 잡는 것이 개발 효율성 측면에서 훨씬 좋습니다.
2) 골든 레이시오(1:1.618)는 어떻게 써야 합니까: 절대 규칙이 아닌 프레임
- 휴머노이드 얼굴 설계 프로젝트를 시작할 때, 많은 디자이너가 가장 먼저 골든 레이시오(Golden Ratio)를 가져옵니다. 하지만 저는 골든 레이시오는 절대 규칙이 아니라 초기 설계의 ‘참고 기준점’이라고 강조합니다.
- 실전에서 제가 골든 레이시오를 활용하는 방식은 보통 다음 2가지입니다.
- 전체 윤곽의 신속한 검증: 얼굴 길이 대비 폭의 비율, 그리고 광대에서 턱으로 이어지는 라인의 전체적인 균형을 스케치 단계에서 빠르게 점검하는 용도로만 사용합니다.
- 핵심 레이아웃 힌트: 눈, 코, 입의 배치가 전체 얼굴 프레임 내에서 크게 깨지지 않았는지 확인하는 초기 가이드라인 역할입니다.
- 주의점도 명확합니다. 이 비율을 과하게 “정밀 적용”하는 순간 실패합니다. 왜냐하면 실제 휴머노이드는 내부의 기구(와이어, 서보 모터)와 외부의 피부 소재(실리콘 등) 제약으로 인해 수학적 비율을 고정하면 실제 표정 구동 시 비율이 반드시 무너지기 때문입니다. 특히 눈 위치와 턱 길이를 골든 레이시오에 수학적으로 맞추는 과정에서, “가장 중요한 표정 구동 공간”이 줄어드는 문제가 제가 겪었던 흔한 실패 사례였습니다.
3) 얼굴 3분할: 헤어라인-코-턱 균형을 먼저 잡습니다: 인상과 연령대 설정
- 가장 많이 쓰이는 기본 프레임이자 제가 가장 먼저 검토하는 것은 얼굴을 세 구간으로 나누는 방식입니다. 이 3분할은 로봇이 줄 수 있는 인상과 연령대를 설정하는 가장 강력한 기준이 됩니다.
- 기준 예시
- 상안부: 헤어라인 → 눈썹
- 중안부: 눈썹 → 코끝
- 하안부: 코끝 → 턱끝
- 실전 설계 노하우: 완벽히 1:1:1로 맞추기보다, “세 구간 중 한 구간이 과도하게 길거나 짧지 않게” 유지하는 것이 핵심입니다. 제가 실수했던 부분 중 하나는 턱 구간(하안부)을 의도적으로 길게 설계하여 성숙하고 지적인 인상을 주려 했던 것입니다. 하지만 너무 길게 설계하자 로봇이 위압적인 인상을 주거나, 입을 벌리는 개구 동작 시 피부가 과도하게 당겨져 표정에서 찢어짐 현상이 발생했습니다. 반대로 너무 짧으면 친근하지만 유아형 캐릭터로만 보이기 쉽습니다. 따라서 3분할은 인상과 구동 제약을 동시에 고려하는 튜닝 작업이 필수입니다.
4) 눈 비율: 언캐니는 대부분 ‘눈’에서 시작합니다: 인격화의 열쇠
- 휴머노이드 개발자들에게 눈은 “인격화의 열쇠”이자 동시에 “언캐니 밸리의 지뢰밭”입니다. 로봇의 눈을 만드는 것은 광학 장치와 소프트웨어 구동이 결합된 복합 시스템이므로, 비율 하나만으로도 큰 오류가 발생합니다.
- 눈 간격 기준 (5-Eye Principle)
실전에서는 “한 눈의 가로 폭” 정도를 눈 사이 간격의 기준으로 잡는 접근이 가장 안전하고 많이 쓰입니다.
즉, 눈-눈 사이 간격이 눈 폭 대비 지나치게 좁거나 넓으면 '공포스러운 인상'을 줄 위험이 매우 높습니다. 제가 테스트했을 때, 눈 간격의 오차 범위가 ± 10%를 벗어나면 대부분의 피실험자가 즉시 “불편함”을 느꼈습니다. - 눈의 높이 위치
눈이 얼굴 전체에서 너무 위로 올라가면 순진한 유아형, 너무 아래로 내려가면 피곤하거나 위압적인 인상이 생깁니다. 이 위치는 미소 지을 때의 눈꼬리 움직임과 연동되어 왜곡이 발생하므로, 반드시 웃는 표정을 테스트하며 최종 위치를 조정해야 합니다. - 눈 깊이 (오목/돌출)
단순히 비율 문제가 아닙니다. 눈의 깊이는 조명 아래에서 생기는 그림자 패턴을 결정하여 자연스러움에 가장 큰 영향을 줍니다. 눈이 너무 평면이면 장난감 같은 비인격체로 보이고, 너무 깊으면 그늘이 강하게 져서 무섭거나 사악한 인상으로 보일 수 있습니다.
5) 코, 입, 턱 비율: 표정 구동 공간 확보가 핵심입니다: 기구 제약 극복
- 코, 입, 턱은 내부 서보 모터와 와이어링이 집중되는 기계적 복잡성이 높은 영역이므로, 비율을 기계적 제약과 동시에 고려해야 합니다.
- 코
코는 표정 자체를 크게 바꾸지는 않지만, 얼굴의 입체감과 그림자의 가장 큰 기준점을 결정합니다.
따라서 코 길이와 각도를 “조명 반응성” 관점에서 점검하는 것이 유리합니다. 저는 코의 각도와 돌출 정도를 3D 프린팅으로 10회 이상 변경하며 최적의 조명 환경을 테스트했습니다. - 입
입은 활발하게 움직이는 부품이므로, 비율만이 아니라 “입 주변의 충분한 가동 공간” 확보가 절대적으로 중요합니다.
입 주변의 설계 공간이 지나치게 좁으면 와이어나 서보 모터 배치가 어려워지고, 결과적으로 입꼬리의 움직임이 뻣뻣해져 억지 미소처럼 보일 수 있습니다. - 턱
턱은 개구(입 벌림) 동작 시 20도에서 35도 사이의 구동 범위에서 피부가 가장 심하게 당겨지는 경로를 만듭니다.
턱 라인이 과도하게 날카롭거나 길이가 과하면, 표정을 지을 때 피부에 '찢어짐'이나 '주름 과장'과 같은 현상이 발생하기 쉽습니다. 따라서 턱 비율은 구동 시뮬레이션을 통해 최종 결정되어야 합니다.
6) 실패 사례 4가지와 해결 전략: 직접 겪은 문제와 노하우
| 실패 유형 | 원인 분석 (저의 경험) | 실전 해결 전략 및 노하우 |
| 실패 1) 얼굴이 전체적으로 '낯설게' 보입니다 | 3분할의 미세한 불균형, 눈 위치를 인간 평균보다 5mm 이상 과하게 올리거나 내린 경우, 얼굴 폭 대비 길이가 과도하게 긴 경우였습니다. | 3분할을 1:1:1 ± 5% 범위 내로 재조정하고, 눈 위치를 중앙 영역으로 되돌려 표정 구동 시에도 안정감을 유지하도록 설계합니다. |
| 실패 2) 눈이 귀엽거나 무서워 보입니다 (극단 인상) | 눈 간격이 눈 폭의 0.8 × 미만이거나 1.2 × 초과, 그리고 동공 크기 대비 눈의 크기를 과장한 경우였습니다. | 눈 간격을 “한 눈의 가로 폭”을 기준으로 재설정하고, 동공의 크기(디스플레이) 대비 눈의 외곽 크기 과장을 최대한 제한해야 합니다. |
| 실패 3) 표정을 지으면 비율이 무너집니다 | 입/턱 주변의 서보 모터/와이어링 때문에 생긴 가동 공간 부족, 그리고 제가 사용한 실리콘 피부의 두께/탄성 설계 미흡 때문이었습니다. | ‘표정 구동 범위’를 먼저 정하고 비율을 맞추는 역순 설계 방식을 채택합니다. 피부와 프레임 간섭 지점을 3D 시뮬레이션으로 철저히 제거해야 합니다. |
| 실패 4) 사진에서는 괜찮은데 실제로는 이상합니다 | 카메라 플래시나 스튜디오 조명에서는 그림자가 부드러웠으나, 실제 환경(실내/실외)에서 조명 패턴이 달라져 눈과 코 주변의 그림자가 급격히 변하는 문제였습니다. | 실내, 실외, 낮은 조명 조건에서 실물 테스트를 반드시 수행합니다. 특히 코의 각도와 눈의 깊이를 조정하여 그림자 패턴을 안정화하는 것이 핵심입니다. |
7) 체크리스트: 설계 및 검증 점검용 (자가 진단)
- 얼굴 3분할(헤어라인-코-턱)이 한 구간만 과도하게 길거나 짧지 않고 1:1:1에 가깝게 균형을 이루고 있습니까?
- 눈 간격이 “눈 폭” 기준에서 크게 벗어나지 않고 ± 10% 범위 내에 있습니까?
- 눈 높이 위치가 극단(과상/과하)으로 치우치지 않고, 미소 구동 시에도 안정적입니까?
- 눈 깊이와 코 각도로 인해 생성된 그림자 패턴이 어떤 조명에서도 무섭거나 장난감처럼 보이지 않습니까?
- 입 주변에 구동 공간(모터/와이어/링크)이 충분하며, 자연스러운 입꼬리 움직임이 가능합니까?
- 턱 개구 20도 ~ 35도 사이에서 피부 당김과 프레임 간섭이 없습니까?
- 골든 레이시오(1:1.618)는 참고로만 쓰고, 표정 구동 공간과 기계적 제약을 우선했습니까?
- 실내/실외 조명 조건뿐만 아니라, 근거리(20~30cm)에서 로봇의 인상(부담감/위압감)을 점검했습니까?
8) 관련 글
- 휴머노이드 얼굴 구조의 기본 원리
- 휴머노이드 얼굴의 눈 감정 표현 디자인
- 휴머노이드 얼굴에서의 자연스러운 미소 만들기
- 휴머노이드 얼굴과 인간 얼굴의 인지 심리학
- 휴머노이드 얼굴의 비대칭 설계 철학
9) 결론: 표정 구동 안정성이 핵심
- 결론적으로, 휴머노이드 얼굴 비율 설계는 “수학적으로 완벽한 골든 레이시오를 맞추는 작업”이 아니라, ‘피부 소재와 기구적 제약 속에서도 인지적 안정감을 주는 최적의 허용 범위’를 찾아내는 공학적 튜닝 작업입니다.
- 가장 먼저 잡아야 할 우선순위는 3분할로 인상을 결정하고, 눈 비율로 인격화를 부여한 뒤, 입과 턱은 표정 구동 공간을 확보하는 방향으로 설계해야 합니다.
- 사진이나 3D 모델링 결과만 믿지 마십시오. 반드시 실제 조명과 거리 조건에서 실물 테스트를 수행해야, 우리가 피하고자 하는 언캐니 밸리를 실전에서 줄일 수 있습니다.
Q&A
Q1) 골든 레이시오(1:1.618)를 그대로 적용하면 더 예뻐지지 않습니까
- 반드시 그렇지 않습니다.
- 휴머노이드는 표정 구동과 소재 제약(실리콘 피부의 탄성, 내부 서보 모터의 크기 등)이 있어, 수학적 비율을 고정하면 실제 움직임에서 오히려 어색함이 생길 수 있습니다. 이는 정지된 조각상과 움직이는 로봇의 근본적인 차이입니다.
Q2) 비율에서 가장 먼저 잡아야 할 부위는 어디입니까
- 제가 권장하는 것은 얼굴 3분할(상, 중, 하안부)과 눈 위치/간격입니다.
- 이 두 가지 기본값이 흔들리면, 아무리 정교하게 코나 입을 만들더라도 전체적인 인상이 무너져 버립니다.
Q3) 눈 간격은 어느 정도가 자연스럽습니까
- 가장 안전한 접근은 “한 눈의 가로 폭”을 기준으로 눈 사이 간격을 검증하는 것입니다.
- 이 비율을 기준으로 ± 10% 이내에서 조정하는 것이 실전에서 가장 많이 쓰이는 노하우입니다.
Q4) 사진에서는 괜찮은데 실물에서 어색한 이유는 무엇입니까
- 이는 조명과 거리에 따라 생기는 그림자 패턴이 근본적으로 달라지기 때문입니다.
- 특히 눈 깊이(오목한 정도)와 코의 돌출 각도가 실물 인상을 크게 바꿉니다. 실제 환경에서 그림자 반응을 체크해야 합니다.
Q5) 최소 테스트 1가지만 한다면 무엇을 추천합니까
- 저는 ‘5인 테스트’를 추천합니다. 실내/실외 2조건에서 20~30cm 거리로 얼굴을 관찰하고, “눈이 부담스럽지 않은지, 혹은 너무 장난감 같지는 않은지”를 최소 사용자 5명 이상에게 확인하는 테스트입니다.
- 비율은 측정값보다 인간이 체감하는 거부감을 잡는 것이 더 빨리 문제를 해결합니다.
비율은 한번 정하면 전체 설계를 끌고 갑니다.
따라서 “수학적 골든 레이시오를 맞췄다”보다 “표정 구동에서도 비율이 무너지지 않고, 인간에게 인지적 안정감을 제공한다”를 최종 목표로 잡는 편이 훨씬 더 실전적이며 성공 확률이 높습니다.
'휴머노이드 얼굴 > 1. 시스템 설계 및 핵심 아키텍처' 카테고리의 다른 글
| 휴머노이드 얼굴 구조의 모듈화(서브페이스) 설계 방식: 유지보수 40% 단축을 목표로 하는 구조 전략 (0) | 2025.12.17 |
|---|---|
| 미래형 휴머노이드 얼굴 기술 로드맵: 2030년까지 40축+와 ‘자가 학습 표정’이 표준이 될 수 있습니다 (0) | 2025.12.13 |
| 휴머노이드 얼굴 전체를 제어하는 펌웨어 구조: 50~120Hz 제어 주기로 표정이 “떨리지 않게” 만듭니다 (1) | 2025.12.13 |
| 휴머노이드 얼굴 프레임 설계 과정: 3D 프린트 재질(PLA·ABS·Nylon)과 강성·정렬·유지보수 기준 (0) | 2025.12.10 |
| 휴머노이드 얼굴 표현 원리: 인간 43개 근육 vs 12~24축(DOF) 구조 비교 (0) | 2025.12.09 |
| 휴머노이드 얼굴 구조의 기본 원리: 어색함을 줄이는 3대 원리와 체크리스트 (0) | 2025.12.08 |