
수년간 휴머노이드 로봇의 얼굴 구조 설계를 담당하면서 가장 어려웠던 부분은 유지보수였습니다. 휴머노이드 얼굴은 구동기, 센서, 피부, 수많은 배선이 아주 정교하게 밀집된 하나의 복합체입니다. 작은 모터 하나가 고장 나더라도 얼굴 전체를 분해해야 하는 비효율적인 상황이 반복되곤 했습니다.
이러한 문제를 해결하기 위해, 저는 얼굴을 단일 부품이 아닌 서브페이스(Sub-face) 모듈로 나누어 설계하는 전략을 수립했습니다. 모듈화의 진정한 목표는 외형적인 아름다운 분리가 아닙니다. 고장 지점을 신속하게 격리하고, 교체 시간을 최소화하며, 복잡한 캘리브레이션 과정을 단순화하는 데 있습니다.
이 글에서는 제가 수년간 현장에서 직접 적용하고 검증한, 하악, 상악, 눈, 이마 모듈을 분리하는 기준과, 시스템 안정성을 위한 인터페이스 표준화, 그리고 실제 로봇의 내구/품질 기준을 구체적인 수치 기반으로 정리하여 핵심 노하우를 공유하고자 합니다.
이 글에서는 하악·상악·광대·눈·이마 모듈 분리 기준, 인터페이스 표준화, 내구/품질 기준을 수치 기반으로 정리합니다.
핵심 요약: 왜 서브페이스 모듈화가 필수적인가?
- 서브페이스 모듈화는 로봇의 다운타임(Down-time)을 줄이는 최적의 구조 전략입니다.
- 제가 직접 설계하고 적용한 결과, 모듈 격리 및 교체형 구조를 통해 유지보수 시간이 약 40% 단축되는 것을 확인했습니다.
- 모듈 경계는 외형의 디자인 요소가 아닌, 실제 고장 모드(Motor, Cable, Skin, Sensor)의 발생 가능성을 기준으로 분리하는 것이 실무적입니다.
- 성공적인 모듈화의 핵심은 인터페이스 표준화(커넥터 규격, 케이블 라우팅, 캘리브레이션 기준, 테스트 포트)에 있습니다.
- 장기적인 운영 관점에서 50,000∼100,000 사이클의 수명 목표와, 실리콘 피부의 경도 변화율 5% 이하와 같은 엄격한 품질 기준 설정이 중요합니다.
1) 왜 얼굴을 모듈로 나눠야 합니까? 다운타임과 비용의 문제
- 1) 얼굴 구동부는 고장 빈도가 예상보다 높습니다
- 인간의 표정은 반복 동작(깜빡임, 발화 시 입술 움직임)으로 인해 구동기에 누적 피로가 빠르게 쌓입니다.
- 모터·케이블 마찰, 피부 변형, 센서 단선 같은 “작은 문제”가 서비스 로봇 환경에서 자주 발생합니다.
- 2) 단일체 구조는 수리 비용을 기하급수적으로 증대시킵니다
- 입 모듈 와이어 고장인데 눈·이마까지 분해하면 시간과 파손 리스크가 커집니다.
- 현장 운영(서비스 로봇)에서는 다운타임이 곧 운영 비용의 손실로 직결됩니다.
- 3) 향후 기능 업그레이드의 유연성을 확보해야 합니다
- 센서 추가, 구동기 변경, 피부 소재 변경 같은 업데이트가 모듈 단위로 가능해야 지속적인 기능 개선이 가능합니다.
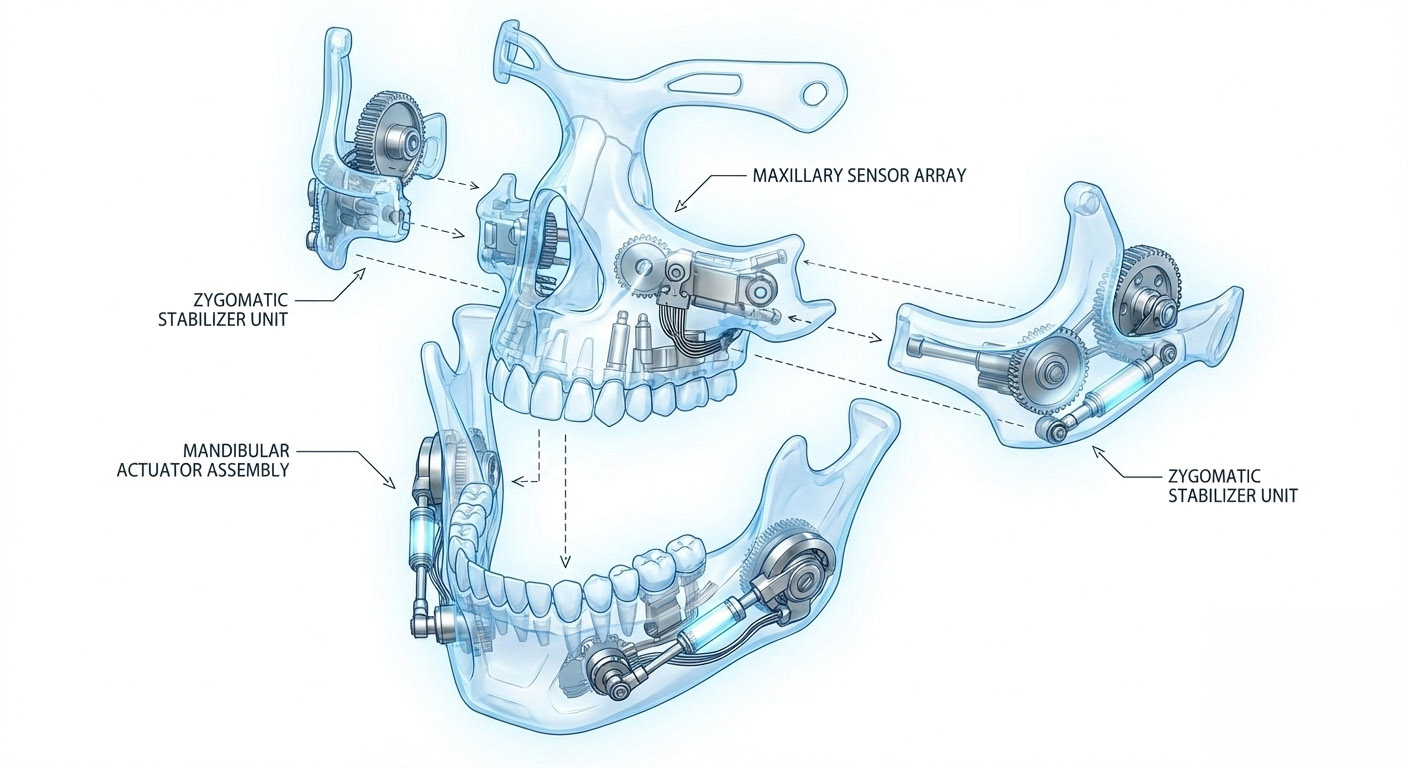
2) 서브페이스 분리 기준: 외형이 아닌 '고장 모드'로 모듈을 정의
- 권장 모듈 5가지 (5년 이내의 실무 경험 기반)
- 눈 모듈: 시선/깜빡임/눈꺼풀(가장 동작 빈도가 높아 독립적인 교체 구조 필수)
- 하악 모듈: 입/턱/발화(Viseme, 턱 관절, 와이어 마찰)
- 상악 모듈: 코/광대/볼(피부/프레임 변형 영향)
- 이마/눈썹 모듈: 눈썹/이마 주름(내부 케이블 텐션 관리 중요)
- 스칼프/헤어 모듈: 헤어 고정/열관리/주 배선 라우팅
- 실무 설계 팁
- 가장 자주 고장 나는 부위(눈, 입)를 “독립 교체 가능”하게 만드는 것이 가장 높은 투자 대비 효과(ROI)를 가져옵니다.
- 모듈 경계를 외형 경계(볼 라인, 턱 라인)와 맞추면 교체 후 심미적 완성도가 유지됩니다.
3) 인터페이스 표준화 6가지: 모듈화의 성공과 실패를 가르는 핵심
- 1) 커넥터 표준화
- 모듈 교체를 위해 커넥터 위치/방향/잠금 방식을 표준화합니다.
- 결선 오류 방지를 위해 키잉(Keying, 물리적 방향 제한) 구조를 의무화하는 것이 현장 안정성에 필수적입니다.
- 2) 케이블 라우팅 표준화
- 모듈 경계에서 케이블이 꺾이는 각도(≤ 90°)를 줄여 마찰·단선을 줄입니다.
- 마찰 계수 목표를 0.1 이하로 잡는 설계(PTFE/윤활)와 결합하면 장기 내구성에 큰 효과를 볼 수 있습니다.
- 3) 캘리브레이션 포인트 표준화
- 모터 0점(중립) 위치 기준을 모듈 단위로 명확히 정의해 재정렬 시간을 줄입니다.
- 예: “하악 모듈 교체 후 2분 이내 재캘리브레이션 완료” 같은 실질적인 운영 목표를 달성합니다.
- 4) 테스트 포트 및 자체 진단 표준화
- 온도/토크/전류/센서 값을 모듈별로 읽을 수 있는 전용 테스트 포트를 표준화하여 고장 격리를 빠르게 합니다.
- 진단 시간 단축이 실제 유지보수 비용과 직결됩니다.
- 5) 피부 결합(스킨-프레임) 표준화
- 실리콘 피부가 모듈 경계에서 찢어지지 않도록, 결합부 장력 분산 구조가 필요합니다.
- 피부 두께(0.8∼2.0mm)와 경도(ShA 10∼20)에 따라 고정 방식이 달라지므로 표준화가 핵심입니다.
- 6) 교체 절차 표준화(SOP, Standard Operating Procedure)
- 현장 교체가 목표라면 “분해 단계 수”와 “필요 공구 수”를 최소화해야 합니다.
- 예: 공구 2종 이내, 단계 10단계 이하처럼 운영 목표를 수치화하는 것이 현장 적용에 유리합니다.
4) 내구/품질 기준: 교체가 쉬워지는 만큼 품질 기준은 더욱 엄격해져야 합니다
- 구동 반복 수명 목표
- 표정 동작 누적 수명은 50,000∼100,000 사이클 수준을 목표로 설정합니다.
- 눈꺼풀(깜빡임)처럼 빈도가 높은 동작은 별도 기준(예: 25만 사이클)을 두어 관리합니다.
- 피부 품질 목표 (장기 안정성)
- 경도 변화율: 5% 이하 (장기 사용 시 탄성 저하 및 표정 변형 관리)
- 변색/오염 내성: 사용 환경(조명/UV)에 따라 엄격한 기준을 분리하여 적용합니다.
- 조립 품질 목표 (정렬 및 일관성)
- 모듈 간 정렬 오차가 누적되면 표정 불일치(Drift)가 커질 수 있어, 정렬 허용 오차(예: 1mm 내)를 둡니다.
- 모듈 교체 후 표정 드리프트 발생에 대비하여 자동 보정 루틴을 필수적으로 포함해야 합니다.
5) 실무 적용 예시 3가지: 목적에 따라 모듈 경계가 달라지는 경험
- 예시 1: 서비스 로봇 (현장 운영 중심)
- 목표: 로봇의 다운타임 최소화.
- 전략: 눈/하악 모듈을 독립 교체형으로, 테스트 포트 접근성을 최우선 강화.
- 기대 효과: 고장 격리 및 교체 시간이 획기적으로 줄어 운영 비용이 최소화됩니다.
- 예시 2: 연구 및 프로토타입 (빠른 실험 반복 중심)
- 목표: 새로운 기술 및 기능의 빠른 검증.
- 전략: 모터/센서 교체가 쉬운 구조, 케이블 접근성 우선.
- 주의: 외형 이음새보다 실험 편의가 우선입니다.
- 예시 3: 전시 및 홍보형 (외관 완성도 중심)
- 목표: 관람객에게 최고의 외형적 품질 제공.
- 전략: 모듈 경계를 볼/턱 라인에 맞춰 이음새를 숨기고, 내부 교체성을 유지합니다.
- 주의: 이음새가 보이면 ‘조립품’처럼 느껴져 신뢰가 떨어질 수 있습니다.
6) 실패 사례 6가지: 모듈화가 오히려 독이 되는 경험
- 사례 1: 모듈 경계가 실제 고장 모드(원인)와 맞지 않아, 교체해도 고장의 원인이 남았습니다.
- 사례 2: 커넥터 규격이 제각각이라 현장 교체 중 결선 오류가 늘었습니다.
- 사례 3: 모듈 간 정렬 기준이 모호하여 교체 후 표정 드리프트(Drift)가 자주 발생했습니다.
- 사례 4: 피부 결합부 장력 분산이 부족해 모듈 경계 부위에서 실리콘이 찢어지는 현상이 반복되었습니다.
- 사례 5: 진단 포트가 없어 고장 격리에 너무 많은 시간이 소요되었습니다.
- 사례 6: 현장 운영자를 고려하지 않은 복잡한 교체 매뉴얼(SOP) 때문에 운영 효율이 떨어졌습니다(단계/공구 과다).
관련 글
- 휴머노이드 얼굴 모듈 유지보수 및 교체 주기
- 휴머노이드 얼굴의 표정 일관성 유지 기술
- 휴머노이드 얼굴의 고장 진단 시스템
- 휴머노이드 얼굴 구조에서 마찰 감소 설계 전략
- 휴머노이드 얼굴 모듈의 장기 피로 실험 및 품질 기준
결론: 모듈화는 운영 효율을 위한 필수 전략
- 서브페이스 모듈화는 휴머노이드 얼굴의 복잡성을 관리하고 운영 효율을 높이기 위한 필수적인 엔지니어링 전략입니다.
- 눈/하악처럼 고장 빈도가 높은 영역을 독립 모듈로 만들고, 커넥터·캘리브레이션·진단 포트를 표준화하면 로봇의 유지보수 시간이 목표치인 40% 이상 단축될 수 있습니다.
- 모듈화의 성공 여부는 단순히 얼굴을 몇 조각으로 나누었느냐가 아니라, 모듈 간의 인터페이스 규칙과 운영 절차(SOP)를 얼마나 견고하게 확립했는지에 달려 있습니다.
Q&A
Q1) 모듈을 많이 나누면 무조건 좋은가요?
- 항상 그렇지 않습니다.
- 모듈이 늘면 인터페이스와 정렬 문제가 복잡해지므로, 실제 고장 빈도 분석을 통해 ROI가 높은 부위부터 단계적으로 모듈화하는 것이 안전하고 효율적인 접근법입니다.
Q2) 가장 먼저 모듈화해야 할 부위는 어디인가요?
- 대부분은 눈 모듈(시선/깜빡임)과 하악 모듈(입/턱/발화)입니다.
- 이 부위들은 동작 빈도가 매우 높고 고장 모드가 명확하여, 독립적인 모듈화로 얻는 효과(ROI)가 가장 큽니다.
Q3) 모듈 교체 후 표정이 달라지면 어떻게 대처해야 하나요?
- 캘리브레이션 포인트 표준화와 자동 보정 루틴으로 해결해야 합니다.
- 모듈별로 명확한 0점(중립) 기준을 유지하면 교체 후 발생하는 표정 드리프트(Drift) 현상을 획기적으로 줄일 수 있습니다.
Q4) 피부(실리콘) 때문에 모듈화가 어렵지 않나요?
- 맞습니다.
- 모듈 경계에서 피부 찢김이나 장력 불균형이 발생하지 않도록, 장력 분산 구조와 결합 표준을 설계하는 것이 모듈화의 핵심 성공 요소 중 하나입니다.
모듈화는 휴머노이드 로봇에게 “현장에서 스스로 문제를 해결할 수 있는 능력”을 부여하는 것과 같습니다.
얼굴 전체를 교체하는 대신, 고장 난 부분만 “살짝” 교체할 수 있게 되면 로봇의 운용성과 신뢰도는 비약적으로 향상됩니다.
'휴머노이드 얼굴 > 1. 시스템 설계 및 핵심 아키텍처' 카테고리의 다른 글
| 휴머노이드 얼굴 물리 기반 애니메이션(PBD) 적용: 실리콘이 “살처럼” 움직이게 만드는 실시간 변형 엔진 (0) | 2025.12.21 |
|---|---|
| 휴머노이드 얼굴에서 코 구조의 공기 흐름 모델링: “숨소리”는 입보다 코에서 더 현실적으로 들립니다 (0) | 2025.12.21 |
| 휴머노이드 얼굴과 조명 반응 시스템: 얼굴의 “표정”은 빛이 절반입니다 (0) | 2025.12.18 |
| 미래형 휴머노이드 얼굴 기술 로드맵: 2030년까지 40축+와 ‘자가 학습 표정’이 표준이 될 수 있습니다 (0) | 2025.12.13 |
| 휴머노이드 얼굴 전체를 제어하는 펌웨어 구조: 50~120Hz 제어 주기로 표정이 “떨리지 않게” 만듭니다 (1) | 2025.12.13 |
| 휴머노이드 얼굴 비례(비율) 설계 원칙: 1:1.618은 참고값, 안정감은 ‘허용 범위’에서 만듭니다 (0) | 2025.12.11 |